


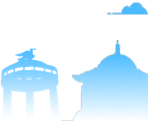
为了提高桥墩(塔)等基础设施结构表面的病害检测效率,本系统通过自主设计的环形可重构攀爬机器人平台,搭载高精度环带视觉扫描系统和多通道图像快速采集系统,解决了传统桥墩病害检测过程中环境适应性差,效率和精度低等问题,实现了对高墩塔结构病害的非接触、全域、高效检测。创新了桥墩结构病害的检测理念。
功能特点:
检测精度:病害测量精度优于 0.1mm;
病害定位误差:垂直误差±1cm,水平误差±5mm;
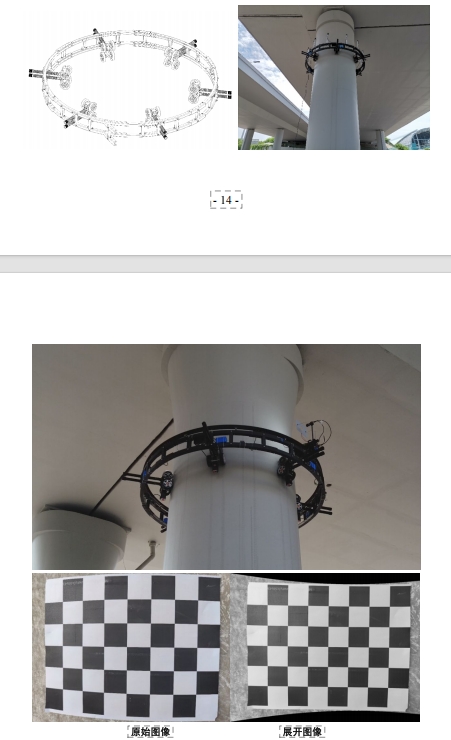
无盲区检测:可以实现对桥墩病害的全域扫描;
现场可重构:分体式结构设计,便于安装和运输;
全自动检测:采集过程中攀爬机器人与采集系统互相发送指令,不需人为干预;柱面图像处理:利用算法进行展开,使图像几何畸变得到校正。
网格化病害处理:运用神经网络对校正后的图像进行识别,定位到病害位置后对相关图像进行拼接测量,最后生成报表。

申请须知:申请人无需注册账号即可提交交易意向,交易意向一经提交不可查询或更改,请准确填写相关信息;平台运营人员将在3-5个工作日内查看交易意向并与您联系,感谢阅读。